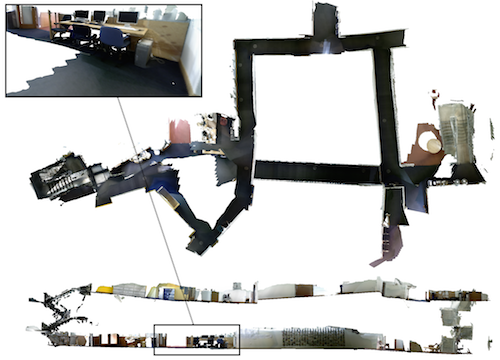
In this episode, Audrow Nash speaks with Professor John Leonard from MIT about his research on dense, object-based 3D Simultaneous Localization And Mapping (SLAM).
Want to check another podcast?
Enter the RSS feed of a podcast, and see all of their public statistics.