Silicon, Oil, and Grit
A robot slinks into a freezing lake and swims upward like a flippered jellyfish. It’s silent, soft, and charged with 6,000 volts. No gears. No metal joints. Just three electrohydraulic flippers—like bionic fins—that bend and whip through water, pushing this little amphibian across two worlds.
This isn’t concept art. It’s a working prototype by researchers at Shanghai Jiao Tong University. And it might just be the future of robots that go where humanoids can’t.
The Soft Electrohydraulic Core
What sets this robot apart isn’t just that it swims and crawls. It’s how. The robot is built around electrohydraulic actuators—essentially silicone oil-filled pouches with electrodes. When high voltage is applied, the electrodes squeeze the pouch, generating internal fluid pressure that causes bending.
Bend the pouch. Move a flipper. Repeat. Add three of these actuators at 120-degree intervals and you’ve got a robot that can:
* Crawl on land at 2.9 cm/s
* Crawl underwater at 3.2 cm/s
* Swim in water at 5.9 cm/s (that’s nearly 1 body length per second)
No gears. No external propellers. Just fluid dynamics and clever control loops.
Flipping Between Worlds
The robot transitions between land and water without changing its body or reconfiguring parts. On land, it uses asymmetric friction between its flippers to crawl. Underwater, it uses fluid-generated lift and thrust to paddle and swim. Its behavior adapts by changing voltage patterns and flipper sync—not hardware.
Even better, it works across a temperature range from 2.1 to 61.3 °C. So whether it’s a flooded basement or icy lake, this droid’s got it covered.
Swimming with Vortex Rings
How does it swim so efficiently? The team studied the flow field around the robot, revealing that its synchronized flippers generate vortex rings—just like squid or jellyfish do. These fluid rings create sustained upward thrust.
Like a water wizard, the robot reclaims some of the energy from each cycle, boosting efficiency. This makes it a rare soft robot with validated dynamic simulations and real-world fluid performance.
Actuation, Upgraded
To handle high-frequency motion without charge retention, the researchers engineered an H-bridge circuit delivering alternating +6 kV / -6 kV pulses with resting states. This reduces polarization in the actuator film, preserving torque over long use.
It also enables omnidirectional motion on flat ground by combining different flipper vectors. Think: a 2D hovercraft… crawling.
“These shifts in movement modes necessitate only the adjustment of control strategies, rather than alterations to the robot’s structural composition.”
— Fang et al., Motion Mode Transition
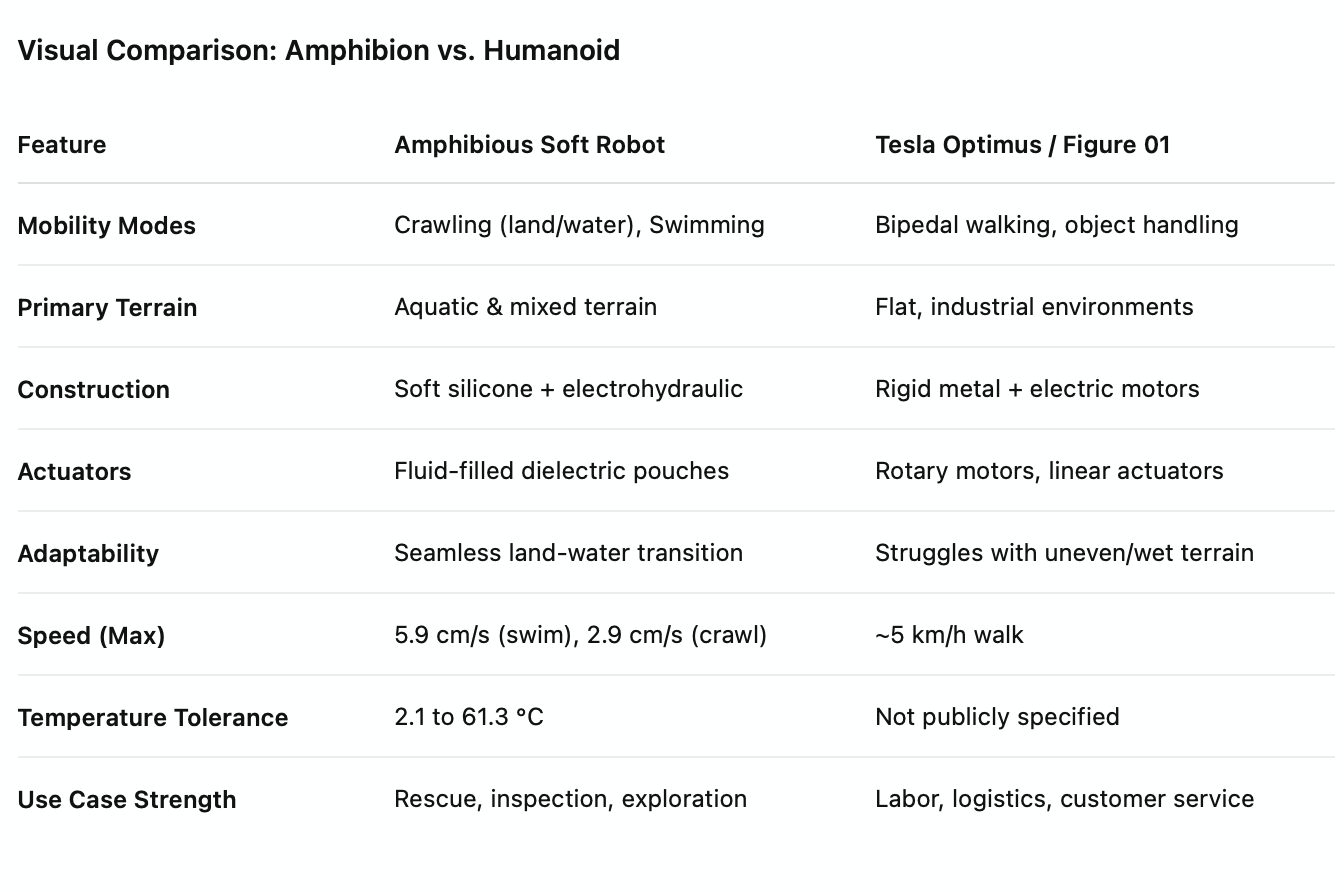
Use Cases: Beyond Humanoids
While humanoids like Optimus and Figure 01 aim to replace warehouse laborers, this droid is more suited for fieldwork: flood rescues, polar research, or deep-pipe inspections.
Its body is compliant, low-noise, and can squeeze through tight spaces without risking damage. Boston Dynamics might dominate dry land, but this bot swims into a new domain.
Battle of the Actuators
Electrohydraulic (EH)
* Precise, fast, works in water
* Complex electronics, high voltage
Pneumatic
* High force, safe
− Bulky compressors, poor finesse
Shape Memory Alloy (SMA)
* Quiet, smooth
− Low energy efficiency, slow actuation
Read the full article at droids.substack.com
#robotics #droidsnewsletter