At RoboBusiness this year, one of the panelists referenced Moravec’s Paradox — the idea that robots are great at tasks humans find hard like precision at scale. But, they struggle with tasks a toddler can do, like picking up a grape. The Wall Street Journal just ran a piece titled “The ‘Hands Problem’ Holding Back the Humanoid Revolution.” It’s a phrase I’ve heard my son — a roboticist — use more than once, and when it shows up both in a lab and on the front page, it’s probably worth unpacking.
Because amid all the hype about walking, talking humanoids, there’s a quieter truth:
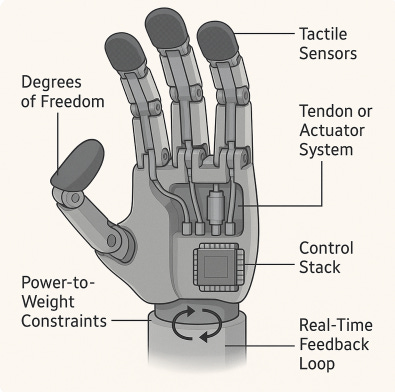
Robot hands are still a bottleneck.
What Is the Hands Problem?
Robots can walk. Robots can dance — for reasons unclear. They’re already lifting crates in factories and hauling parts. But ask one to help someone get dressed, make a sandwich, or change a lightbulb? These are routine, everyday tasks. And they’re still beyond what most machines can reliably do.
As the WSJ put it:
“Before they’re ready to turn a wrench, [robots] must solve … what Elon Musk calls ‘the hands problem.’”
Kevin Lynch, director of Northwestern’s Center for Robotics and Biosystems, offered this timeline:
“We’re setting 10 years as our goal to have dexterity, be functional and useful and able to do some of the things that humans do.”
Others in the field are more optimistic — particularly those exploring hybrid control systems that combine machine learning with human teleoperation. Companies like Sanctuary AI are building humanoids specifically designed for this model, while teams at Covariant — though focused primarily on warehouse picking — reflect a similar philosophy in how they blend perception, planning, and adaptation. Intrinsic, Alphabet’s robotics software arm, has also emphasized this approach in both its public demos and research, aiming to make robotic manipulation more robust by learning from human-guided examples.
#robotics #roboticshandproblem #droidsnewsletter
Read more at droids.substack.com