Shows
Podcast de EscaladaSistemas Dinámicos complejos: Por qué entrenar no es tan simpleLa visión de los sistemas dinámicos complejos ha cambiado la forma de entender el entrenamiento… y casi el mundo entero 🌍.El ser humano es un sistema dinámico complejo, que se adapta continuamente a su entorno, del que aprende y a través del cual se relaciona 🧬.Por eso, el entrenamiento no puede concebirse como un proceso lineal y cerrado.Si una persona es un sistema complejo, la respuesta ante los estímulos será distinta para cada organismo y en cada momento 🧠.Hoy, la visión clásica y lineal del entrenamiento está quedando atrás.Las aproximaciones más actuales entiende...
2025-10-1642 min
UV Coatza-Mina#MiercolesDeCiencia: ¿Por qué utilizamos ecuaciones diferenciales para modelar sistemas dinámicos?Dr. Javier Garrido Meléndez.
Su formación es como Ingeniero Electrónico egresado del Instituto Tecnológico de Minatitlán, estudio la Maestría en Ingeniería Eléctrica y Doctorado en Control Automático en el 2015 por el Centro de Investigaciones de Estudios Avanzados del Instituto Politécnico Nacional (CINVESTAV). Actualmente Profesor de Tiempo Completo de la Facultad de Ingeniería de la Universidad Veracruzana, Campus Coatzacoalcos. Su Producción Académica cuenta con artículos publicados en revistas internaciones, cuenta con el reconocimiento como investigador Nivel 1 por el CONACyT, y el reconocimiento de perfil deseable por p...
2023-04-2605 min
Mesa de contrataciónESPECIAL: Webinar "cómo crear y gestionar sistemas dinámicos de adquisición"Programa especial en el que ofrecemos el audio del webinar celebrado el 20 de septiembre en colaboración con el ITCIP sobre cómo montar y participar en un sistema dinámico de adquisición con la participación de dos expertos: Juan Carlos García Melián (abogado especialista en contratación pública) e Israel Rodríguez (Universidad de Almería y uno de los primeros y más experimentados implementadores de los SDA). Este evento está destinado tanto a Administraciones que quieren aproximarse al uso de los SDA, como a las empresas que quieren adherirse a ellos para desarrollar s...
2022-09-211h 28Mesa de contrataciónESPECIAL: Webinar "cómo crear y gestionar sistemas dinámicos de adquisición"Programa especial en el que ofrecemos el audio del webinar celebrado el 20 de septiembre en colaboración con el ITCIP sobre cómo montar y participar en un sistema dinámico de adquisición con la participación de dos expertos: Juan Carlos García Melián (abogado especialista en contratación pública) e Israel Rodríguez (Universidad de Almería y uno de los primeros y más experimentados implementadores de los SDA). Este evento está destinado tanto a Administraciones que quieren aproximarse al uso de los SDA, como a las empresas que quieren adherirse a ellos para desarrollar s...
2022-09-211h 28
Unidad 7: Diseño de sistemas de control por RVE7.4.5 Diseño de sistemas de control con observadores en MatlabDiseño de sistemas de control representado por ecuaciones en el espacio de estados, mediante la retroalimentacíon del vector de estado o (RVE) acompañado del observador utilizando el software Matlab, correspondiente a la Unidad 7: Diseño de sistemas de control en el espacio de estados, perteneciente al curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
2016-07-0200 minUnidad 7: Diseño de sistemas de control por RVE7.1 Representación de sistemas de control en el espacio de estadosRepresentación de sistemas de control mediante ecuaciones en el espacio de estados, correspondiente a la Unidad 7: Diseño de sistemas de control en el espacio de estados, perteneciente al curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
2016-06-1501 min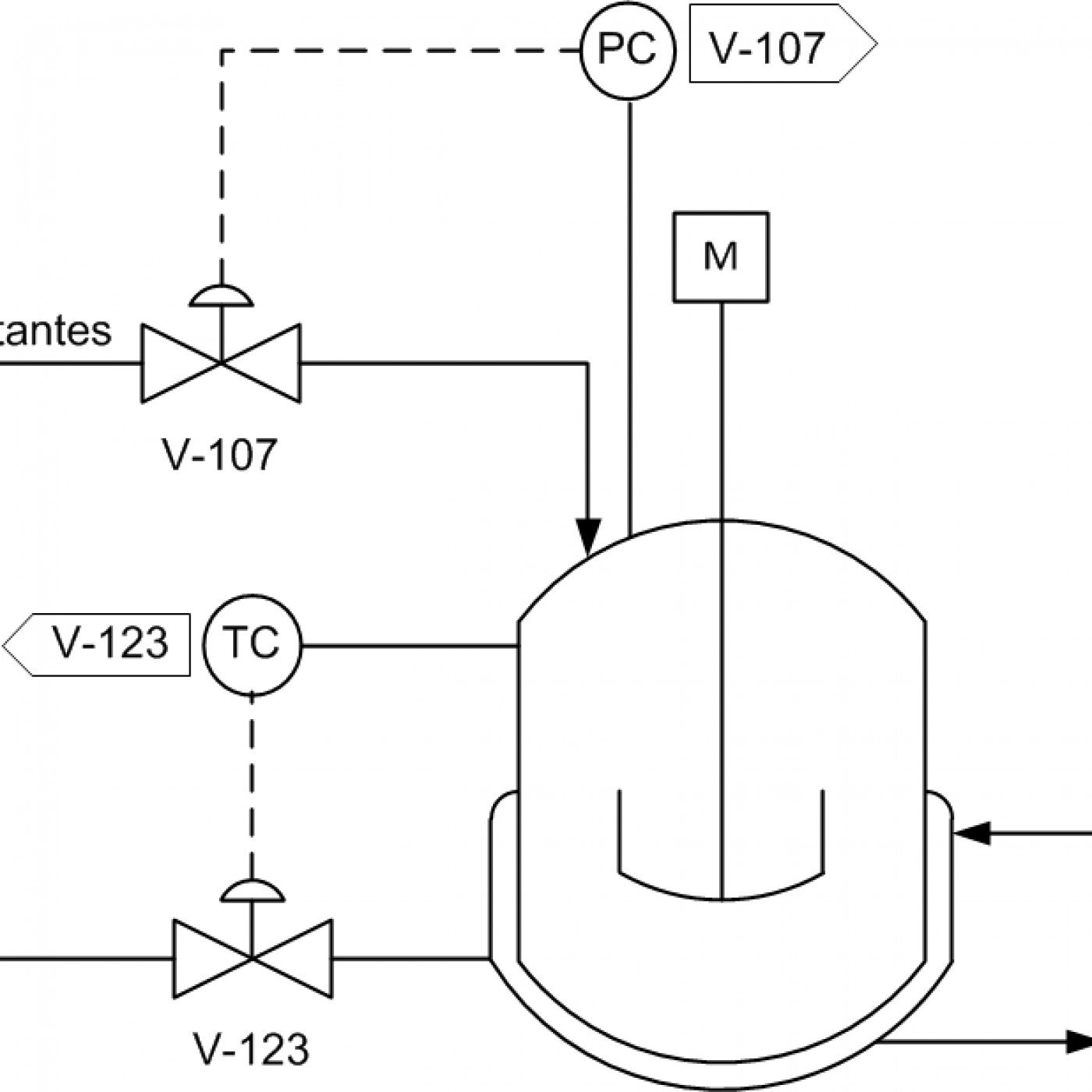
Unidad 5: Introducción a los sistemas de control5.8 Estabilidad de sistemas de control en lazo cerradoCriterio general de estabilidad para sistemas de control en lazo cerrado, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
2016-04-2301 minUnidad 5: Introducción a los sistemas de control5.1 Tipos de sistemas de controlDefinición de las clases o tipos de sistemas de control, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
2016-04-2004 minUnidad 5: Introducción a los sistemas de controlTerminología de los sistemas de controlPrincipales términos utilizados en el análisis y diseño de los sistemas de control, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
2016-04-1502 minUnidad 5: Introducción a los sistemas de controlObjetivos de los sistemas de controlObjetivos principales de los sistemas de control, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
2016-04-1502 minUnidad 5: Introducción a los sistemas de control5. Introducción a los sistemas de controlIntroducción para la Unidad 5: Introducción a los sistemas de control, perteneciente al curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
2016-04-1502 min
Unidad 4: Análisis de Sistemas Dinámicos4.7.3 Representación de diagramas de Nyquist con MatlabObtención de la respuesta frecuencial, mediante el diagrama de Nyquist para sistemas físicos frente a funciones de excitación o entrada senoidal, con el software Matlab. Correspondiente a la Unidad 4: Análisis de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control para carreras de Ingeniería mecánica, eléctrica , electrónica y afines.
2016-03-2302 minUnidad 4: Análisis de Sistemas Dinámicosc) Factores de segundo ordenRepresentación en el dominio de la frecuencia de sistemas físicos, mediante el diagrama de Nyquist para los factores del tipo de segundo orden. Correspondiente a la Unidad 4: Análisis de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control para carreras de Ingeniería mecánica, eléctrica , electrónica y afines.
2016-03-2304 minUnidad 4: Análisis de Sistemas Dinámicosb) Factores de primer ordenRepresentación en el dominio de la frecuencia de sistemas físicos, mediante el diagrama de Nyquist para los factores del tipo de primer orden. Correspondiente a la Unidad 4: Análisis de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control para carreras de Ingeniería mecánica, eléctrica , electrónica y afines.
2016-03-2301 minUnidad 4: Análisis de Sistemas Dinámicosa) Factores del tipo sRepresentación en el dominio de la frecuencia de sistemas físicos, mediante el diagrama de Nyquist para los factores del tipo s. Correspondiente a la Unidad 4: Análisis de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control para carreras de Ingeniería mecánica, eléctrica , electrónica y afines.
2016-03-2300 minUnidad 4: Análisis de Sistemas Dinámicos4.7.2 Diagrama de NyquistRepresentación en el dominio de la frecuencia de sistemas físicos, mediante el diagrama de Nyquist. Correspondiente a la Unidad 4: Análisis de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control para carreras de Ingeniería mecánica, eléctrica , electrónica y afines.
2016-03-2301 minUnidad 4: Análisis de Sistemas Dinámicos4.6.2 Representación de diagramas de Bode con MatlabObtención de la respuesta frecuencial, mediante el diagrama de Bode para sistemas físicos frente a funciones de excitación o entrada senoidal, con el software Matlab. Correspondiente a la Unidad 4: Análisis de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control para carreras de Ingeniería mecánica, eléctrica , electrónica y afines.
2016-03-2202 minUnidad 4: Análisis de Sistemas Dinámicosd) Factores de segundo ordenRepresentación en el dominio de la frecuencia de sistemas físicos, mediante el diagrama de Bode para los factores del tipo de segundo orden. Correspondiente a la Unidad 4: Análisis de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control para carreras de Ingeniería mecánica, eléctrica , electrónica y afines.
2016-03-2207 minUnidad 4: Análisis de Sistemas Dinámicosc) Factores de primer ordenRepresentación en el dominio de la frecuencia de sistemas físicos, mediante el diagrama de Bode para los factores del tipo de primer orden. Correspondiente a la Unidad 4: Análisis de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control para carreras de Ingeniería mecánica, eléctrica , electrónica y afines.
2016-03-2106 minUnidad 4: Análisis de Sistemas Dinámicosb) Factores del tipo sRepresentación en el dominio de la frecuencia de sistemas físicos, mediante el diagrama de Bode para los factores del tipo s. Correspondiente a la Unidad 4: Análisis de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control para carreras de Ingeniería mecánica, eléctrica , electrónica y afines.
2016-03-2003 minUnidad 4: Análisis de Sistemas Dinámicosa) Modulo K o constante KRepresentación en el dominio de la frecuencia de sistemas físicos, mediante el diagrama de Bode para las constantes o factores del tipo K. Correspondiente a la Unidad 4: Análisis de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control para carreras de Ingeniería mecánica, eléctrica , electrónica y afines.
2016-03-2000 minUnidad 4: Análisis de Sistemas Dinámicos4.6.1 Diagrama de BodeRepresentación en el dominio de la frecuencia de sistemas físicos, mediante el diagrama de Bode. Correspondiente a la Unidad 4: Análisis de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control para carreras de Ingeniería mecánica, eléctrica , electrónica y afines.
2016-03-2001 minUnidad 4: Análisis de Sistemas Dinámicos4.5 Especificaciones de la respuesta frecuencialEspecificaciones de la respuesta en frecuencia o frecuencial para los sistemas físicos frente a funciones de excitación o entrada del tipo senoidal. Correspondiente a la Unidad 4: Análisis de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control para carreras de Ingeniería mecánica, eléctrica , electrónica y afines.
2016-03-2003 minUnidad 4: Análisis de Sistemas Dinámicos4.4.4 Respuesta para varios bloques en serieRespuesta frecuencial para sistemas formados por varios componentes en serie, ante una entrada del tipo senoidal o cosenoidal. Correspondiente a la Unidad 4: Análisis de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control para carreras de Ingeniería mecánica, eléctrica , electrónica y afines.
2016-03-1901 minUnidad 4: Análisis de Sistemas Dinámicos4.4.3 Sistemas de orden nConcepto de sistemas físicos representados mediante ecuaciones diferenciales y función de transferencia de orden n u orden superior. Correspondiente a la Unidad 4: Análisis de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control para carreras de Ingeniería mecánica, eléctrica , electrónica y afines.
2016-03-1800 minUnidad 4: Análisis de Sistemas Dinámicosa) Respuesta armónica o senoidal sistemas de orden nRespuesta ante una función de entrada del tipo senoidal y cosenoidal para los sistemas físicos representados mediante ecuaciones diferenciales de orden superior u orden n. Correspondiente a la Unidad 4: Análisis de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control para carreras de Ingeniería mecánica, eléctrica , electrónica y afines.
2016-03-1803 minUnidad 4: Análisis de Sistemas Dinámicosa) Respuesta armónica o senoidal sistemas de segundo ordenRespuesta ante una función de entrada del tipo senoidal y cosenoidal para los sistemas físicos representados mediante ecuaciones diferenciales de segundo orden. Correspondiente a la Unidad 4: Análisis de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control para carreras de Ingeniería mecánica, eléctrica , electrónica y afines.
2016-03-1802 minUnidad 4: Análisis de Sistemas Dinámicos4.4.2 Sistemas de segundo ordenConcepto de sistemas físicos representados mediante ecuaciones diferenciales y función de transferencia de segundo orden. Correspondiente a la Unidad 4: Análisis de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control para carreras de Ingeniería mecánica, eléctrica , electrónica y afines.
2016-03-1800 minUnidad 4: Análisis de Sistemas Dinámicosa) Respuesta armónica o senoidal sistemas de primer ordenRespuesta ante una función de entrada del tipo senoidal y cosenoidal para los sistemas físicos representados mediante ecuaciones diferenciales de primer orden. Correspondiente a la Unidad 4: Análisis de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control para carreras de Ingeniería mecánica, eléctrica , electrónica y afines.
2016-03-1702 minUnidad 4: Análisis de Sistemas Dinámicos4.4.1 Sistemas de primer ordenConcepto de sistemas físicos representados mediante ecuaciones diferenciales y función de transferencia de primer orden. Correspondiente a la Unidad 4: Análisis de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control para carreras de Ingeniería mecánica, eléctrica , electrónica y afines.
2016-03-1700 minUnidad 4: Análisis de Sistemas Dinámicos4.3.3 Estabilidad para los sistemas de orden nRegiones de estabilidad para los sistemas físicos representados mediante ecuaciones diferenciales de orden superior u orden n. Correspondiente a la Unidad 4: Análisis de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control para carreras de Ingeniería mecánica, eléctrica , electrónica y afines.
2016-03-1601 minUnidad 4: Análisis de Sistemas Dinámicos4.3.2 Estabilidad para los sistemas de segundo ordenRegiones de estabilidad para los sistemas físicos representados mediante ecuaciones diferenciales de segundo orden. Correspondiente a la Unidad 4: Análisis de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control para carreras de Ingeniería mecánica, eléctrica , electrónica y afines.
2016-03-1600 minUnidad 4: Análisis de Sistemas Dinámicos4.3.1 Estabilidad para los sistemas de primer ordenRegiones de estabilidad para los sistemas físicos representados mediante ecuaciones diferenciales de primer orden. Correspondiente a la Unidad 4: Análisis de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control para carreras de Ingeniería mecánica, eléctrica , electrónica y afines.
2016-03-1600 minUnidad 4: Análisis de Sistemas Dinámicos4) Contribución de un polo múltiple complejo sistemas de orden nContribución de un polo múltiple complejo para la respuesta ante una función de entrada del tipo impulso unitario en los sistemas físicos representados mediante ecuaciones diferenciales de orden superior u orden n. Correspondiente a la Unidad 4: Análisis de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control para carreras de Ingeniería mecánica, eléctrica , electrónica y afines.
2016-03-1501 minUnidad 4: Análisis de Sistemas Dinámicos3) Contribución de un polo múltiple real sistemas de orden nContribución de un polo múltiple real para la respuesta ante una función de entrada del tipo impulso unitario en los sistemas físicos representados mediante ecuaciones diferenciales de orden superior u orden n. Correspondiente a la Unidad 4: Análisis de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control para carreras de Ingeniería mecánica, eléctrica , electrónica y afines.
2016-03-1501 minUnidad 4: Análisis de Sistemas Dinámicos2) Contribución de un polo complejo simple y su conjugado sistemas de orden nContribución de un polo complejo simple y su conjugado para la respuesta ante una función de entrada del tipo impulso unitario en los sistemas físicos representados mediante ecuaciones diferenciales de orden superior u orden n. Correspondiente a la Unidad 4: Análisis de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control para carreras de Ingeniería mecánica, eléctrica , electrónica y afines.
2016-03-1501 minUnidad 4: Análisis de Sistemas Dinámicos1) Contribución de un polo simple real sistemas de orden nContribución de un polo simple real para la respuesta ante una función de entrada del tipo impulso unitario en los sistemas físicos representados mediante ecuaciones diferenciales de orden superior u orden n. Correspondiente a la Unidad 4: Análisis de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control para carreras de Ingeniería mecánica, eléctrica , electrónica y afines.
2016-03-1500 minUnidad 4: Análisis de Sistemas Dinámicosa) Respuesta al impulso unitario sistemas de orden nRespuesta ante una función de entrada del tipo impulso unitario para los sistemas físicos representados mediante ecuaciones diferenciales de orden superior u orden n. Correspondiente a la Unidad 4: Análisis de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control para carreras de Ingeniería mecánica, eléctrica , electrónica y afines.
2016-03-1501 minUnidad 4: Análisis de Sistemas Dinámicos4.1.3 Sistemas de orden nConcepto de sistemas físicos representados mediante ecuaciones diferenciales de orden superior u orden n. Correspondiente a la Unidad 4: Análisis de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control para carreras de Ingeniería mecánica, eléctrica , electrónica y afines.
2016-03-1501 minUnidad 4: Análisis de Sistemas Dinámicos4) Caso sobreamortiguado respuesta rampa sistemas de segundo ordenCaso sobre amortiguado para la respuesta ante una función de entrada del tipo rampa unitaria para los sistemas físicos representados mediante ecuaciones diferenciales de segundo orden. Correspondiente a la Unidad 4: Análisis de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control para carreras de Ingeniería mecánica, eléctrica , electrónica y afines.
2016-03-1401 minUnidad 4: Análisis de Sistemas Dinámicos3) Caso críticamente amortiguado respuesta rampa sistemas de segundo ordenCaso críticamente amortiguado para la respuesta ante una función de entrada del tipo rampa unitaria para los sistemas físicos representados mediante ecuaciones diferenciales de segundo orden. Correspondiente a la Unidad 4: Análisis de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control para carreras de Ingeniería mecánica, eléctrica , electrónica y afines.
2016-03-1400 minUnidad 4: Análisis de Sistemas Dinámicos2) Caso oscilatorio puro respuesta rampa sistemas de segundo ordenCaso oscilatorio puro para la respuesta ante una función de entrada del tipo rampa unitaria para los sistemas físicos representados mediante ecuaciones diferenciales de segundo orden. Correspondiente a la Unidad 4: Análisis de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control para carreras de Ingeniería mecánica, eléctrica , electrónica y afines.
2016-03-1401 minUnidad 4: Análisis de Sistemas Dinámicos1) Caso subamortiguado respuesta rampa sistemas de segundo ordenCaso subamortiguado para la respuesta ante una función de entrada del tipo rampa unitaria para los sistemas físicos representados mediante ecuaciones diferenciales de segundo orden. Correspondiente a la Unidad 4: Análisis de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control para carreras de Ingeniería mecánica, eléctrica , electrónica y afines.
2016-03-1402 minUnidad 4: Análisis de Sistemas Dinámicosc) Respuesta a la rampa unitaria sistemas de segundo ordenRespuesta ante una función de entrada del tipo rampa unitaria para los sistemas físicos representados mediante ecuaciones diferenciales de segundo orden. Correspondiente a la Unidad 4: Análisis de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control para carreras de Ingeniería mecánica, eléctrica , electrónica y afines.
2016-03-1200 minUnidad 4: Análisis de Sistemas Dinámicos4) Caso sobreamortiguado respuesta escalón sistemas de segundo ordenCaso sobre amortiguado para la respuesta ante una función de entrada del tipo escalón unitario para los sistemas físicos representados mediante ecuaciones diferenciales de segundo orden. Correspondiente a la Unidad 4: Análisis de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control para carreras de Ingeniería mecánica, eléctrica , electrónica y afines.
2016-03-1201 minUnidad 4: Análisis de Sistemas Dinámicos3) Caso críticamente amortiguado respuesta escalón sistemas de segundo ordenCaso críticamente amortiguado para la respuesta ante una función de entrada del tipo escalón unitario para los sistemas físicos representados mediante ecuaciones diferenciales de segundo orden. Correspondiente a la Unidad 4: Análisis de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control para carreras de Ingeniería mecánica, eléctrica , electrónica y afines.
2016-03-1201 minUnidad 4: Análisis de Sistemas Dinámicos2) Caso oscilatorio puro respuesta escalón sistemas de segundo ordenCaso oscilatorio puro para la respuesta ante una función de entrada del tipo escalón unitario para los sistemas físicos representados mediante ecuaciones diferenciales de segundo orden. Correspondiente a la Unidad 4: Análisis de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control para carreras de Ingeniería mecánica, eléctrica , electrónica y afines.
2016-03-1201 minUnidad 4: Análisis de Sistemas Dinámicos1) Caso subamortiguado respuesta escalón sistemas de segundo ordenCaso subamortiguado para la respuesta ante una función de entrada del tipo escalón unitario para los sistemas físicos representados mediante ecuaciones diferenciales de segundo orden. Correspondiente a la Unidad 4: Análisis de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control para carreras de Ingeniería mecánica, eléctrica , electrónica y afines.
2016-03-1202 minUnidad 4: Análisis de Sistemas Dinámicosb) Respuesta al escalón unitario sistemas de segundo ordenRespuesta ante una función de entrada del tipo escalón unitario para los sistemas físicos representados mediante ecuaciones diferenciales de segundo orden. Correspondiente a la Unidad 4: Análisis de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control para carreras de Ingeniería mecánica, eléctrica , electrónica y afines.
2016-03-1200 minUnidad 4: Análisis de Sistemas Dinámicos4) Caso sobreamortiguado respuesta impulso sistemas de segundo ordenCaso sobre amortiguado para la respuesta ante una función de entrada del tipo impulso unitario para los sistemas físicos representados mediante ecuaciones diferenciales de segundo orden. Correspondiente a la Unidad 4: Análisis de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control para carreras de Ingeniería mecánica, eléctrica , electrónica y afines.
2016-03-1001 minUnidad 4: Análisis de Sistemas Dinámicos3) Caso críticamente amortiguado respuesta impulso sistemas de segundo ordenCaso críticamente amortiguado para la respuesta ante una función de entrada del tipo impulso unitario para los sistemas físicos representados mediante ecuaciones diferenciales de segundo orden. Correspondiente a la Unidad 4: Análisis de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control para carreras de Ingeniería mecánica, eléctrica , electrónica y afines.
2016-03-1000 minUnidad 4: Análisis de Sistemas Dinámicos2) Caso oscilatorio puro respuesta impulso sistemas de segundo ordenCaso oscilatorio puro para la respuesta ante una función de entrada del tipo impulso unitario para los sistemas físicos representados mediante ecuaciones diferenciales de segundo orden. Correspondiente a la Unidad 4: Análisis de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control para carreras de Ingeniería mecánica, eléctrica , electrónica y afines.
2016-03-1000 minUnidad 4: Análisis de Sistemas Dinámicos1) Caso subamortiguado respuesta impulso sistemas de segundo ordenCaso subamortiguado para la respuesta ante una función de entrada del tipo impulso unitario para los sistemas físicos representados mediante ecuaciones diferenciales de segundo orden. Correspondiente a la Unidad 4: Análisis de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control para carreras de Ingeniería mecánica, eléctrica , electrónica y afines.
2016-03-1002 minUnidad 4: Análisis de Sistemas Dinámicosa) Respuesta al impulso unitario sistemas de segundo ordenRespuesta ante una función de entrada del tipo impulso unitario para los sistemas físicos representados mediante ecuaciones diferenciales de segundo orden. Correspondiente a la Unidad 4: Análisis de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control para carreras de Ingeniería mecánica, eléctrica , electrónica y afines.
2016-03-0901 minUnidad 4: Análisis de Sistemas Dinámicos4.1.2 Sistemas de segundo ordenConcepto de sistemas físicos representados mediante ecuaciones diferenciales de segundo orden. Correspondiente a la Unidad 4: Análisis de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control para carreras de Ingeniería mecánica, eléctrica , electrónica y afines.
2016-03-0901 minUnidad 4: Análisis de Sistemas Dinámicosc) Respuesta a la rampa unitaria sistemas de primer ordenRespuesta ante una función de entrada del tipo rampa unitaria para los sistemas físicos representados mediante ecuaciones diferenciales de primer orden. Correspondiente a la Unidad 4: Análisis de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control para carreras de Ingeniería mecánica, eléctrica , electrónica y afines.
2016-03-0802 minUnidad 4: Análisis de Sistemas Dinámicosb) Respuesta al escalón unitario sistemas de primer ordenRespuesta ante una función de entrada del tipo escalón unitario para los sistemas físicos representados mediante ecuaciones diferenciales de primer orden. Correspondiente a la Unidad 4: Análisis de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control para carreras de Ingeniería mecánica, eléctrica , electrónica y afines.
2016-03-0802 minUnidad 4: Análisis de Sistemas Dinámicosa) Respuesta al impulso unitario sistemas de primer ordenRespuesta ante una función de entrada del tipo impulso unitario para los sistemas físicos representados mediante ecuaciones diferenciales de primer orden. Correspondiente a la Unidad 4: Análisis de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control para carreras de Ingeniería mecánica, eléctrica , electrónica y afines.
2016-03-0801 minUnidad 4: Análisis de Sistemas Dinámicos4.1.1 Sistemas de primer ordenConcepto de sistemas físicos representados mediante ecuaciones diferenciales de primer orden. Correspondiente a la Unidad 4: Análisis de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control para carreras de Ingeniería mecánica, eléctrica , electrónica y afines.
2016-03-0800 minUnidad 4: Análisis de Sistemas Dinámicos4. Introducción al Análisis de sistemas DinámicosIntroducción para la Unidad 4: Análisis de sistemas dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
2016-03-0801 min
Unidad 2: Modelado de Sistemas Dinámicose) Circuito con bombilloModelado de sistemas híbridos: Se presenta la definición y representación matemática de los circuitos eléctricos con bombillos. Tema correspondiente a la Unidad 2: Modelado de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control, para las carreras de ingeniería eléctrica, electrónica, mecánica y afines.
2016-02-1101 minUnidad 2: Modelado de Sistemas Dinámicosd) Válvula con actuador neumáticoModelado de sistemas híbridos: Se presenta la definición y representación matemática de las válvulas con actuador neumático. Tema correspondiente a la Unidad 2: Modelado de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control, para las carreras de ingeniería eléctrica, electrónica, mecánica y afines.
2016-02-1102 minUnidad 2: Modelado de Sistemas Dinámicosc) ServomotorModelado de sistemas híbridos: Se presenta la definición y representación matemática de los servomotores hidráulicos. Tema correspondiente a la Unidad 2: Modelado de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control, para las carreras de ingeniería eléctrica, electrónica, mecánica y afines.
2016-02-1103 minUnidad 2: Modelado de Sistemas Dinámicosb) Turbina hidráulicaModelado de sistemas híbridos: Se presenta la definición y representación matemática de las turbinas hidráulicas. Tema correspondiente a la Unidad 2: Modelado de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control, para las carreras de ingeniería eléctrica, electrónica, mecánica y afines.
2016-02-1101 minUnidad 2: Modelado de Sistemas Dinámicos2.9.1 Ecuaciones de equilibrio para sistemas interactivosSe presentan las leyes y ecuaciones de equilibrio que rigen el comportamiento de los sistemas interactivo y no interactivos. Tema correspondiente a la Unidad 2: Modelado de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control, para las carreras de ingeniería eléctrica, electrónica, mecánica y afines.
2016-02-1101 minUnidad 2: Modelado de Sistemas Dinámicos2.9 Modelado de sistemas interactivosSe presentan la definición y características de los sistemas interactivos y no interactivos. Tema correspondiente a la Unidad 2: Modelado de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control, para las carreras de ingeniería eléctrica, electrónica, mecánica y afines.
2016-02-1101 minUnidad 2: Modelado de Sistemas Dinámicosa) Motor eléctricoModelado de sistemas híbridos: Se presenta la definición y representación matemática de los motores eléctricos. Tema correspondiente a la Unidad 2: Modelado de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control, para las carreras de ingeniería eléctrica, electrónica, mecánica y afines.
2016-02-1002 minUnidad 2: Modelado de Sistemas Dinámicos2.12 Metodología para la obtencion de modelos matematicosSe presenta la metodologia para la formulación y obtención de modelos matemáticos de sistemas físicos, mediante un procedimiento sistemático. Tema correspondiente a la Unidad 2: Modelado de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control, para las carreras de ingeniería eléctrica, electrónica, mecánica y afines.
2016-02-1004 minUnidad 2: Modelado de Sistemas Dinámicos2.11 Analogía entre sistemasSe presentan las principales analogías que existen en la representación y modelado de los sistemas dinámicos. Tema correspondiente a la Unidad 2: Modelado de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control, para las carreras de ingeniería eléctrica, electrónica, mecánica y afines.
2016-02-1001 minUnidad 2: Modelado de Sistemas Dinámicos2.10 Modelado de sistemas hibridosSe presentan la definición y características de los sistemas híbridos. Tema correspondiente a la Unidad 2: Modelado de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control, para las carreras de ingeniería eléctrica, electrónica, mecánica y afines.
2016-02-1002 minUnidad 2: Modelado de Sistemas Dinámicos2.10.1 Ecuaciones de equilibrio para sistemas hibridosSe presentan las leyes y ecuaciones de equilibrio que rigen el comportamiento de los sistemas hibridos. Tema correspondiente a la Unidad 2: Modelado de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control, para las carreras de ingeniería eléctrica, electrónica, mecánica y afines.
2016-02-1000 minUnidad 2: Modelado de Sistemas Dinámicos2.8.1 Ecuaciones de equilibrio para sistemas eléctricosSe presentan las leyes y ecuaciones de equilibrio que rigen el comportamiento de los sistemas eléctricos. Tema correspondiente a la Unidad 2: Modelado de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control, para las carreras de ingeniería eléctrica, electrónica, mecánica y afines.
2016-02-1002 minUnidad 2: Modelado de Sistemas Dinámicosc) Inertancia eléctricaElementos de modelado de sistemas eléctricos, representación matemática y definición de inductancia eléctrica o inertancia eléctrica. Tema correspondiente a la Unidad 2: Modelado de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control, para las carreras de ingeniería eléctrica, electrónica, mecánica y afines.
2016-02-1001 minUnidad 2: Modelado de Sistemas Dinámicosc) Capacitancia eléctricaElementos de modelado de sistemas eléctricos, representación matemática y definición de capacitancia eléctrica. Tema correspondiente a la Unidad 2: Modelado de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control, para las carreras de ingeniería eléctrica, electrónica, mecánica y afines.
2016-02-1002 minUnidad 2: Modelado de Sistemas Dinámicosa) Resistencia eléctricaElementos de modelado de sistemas eléctricos, representación matemática y definición de resistencia eléctrica. Tema correspondiente a la Unidad 2: Modelado de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control, para las carreras de ingeniería eléctrica, electrónica, mecánica y afines.
2016-02-1001 minUnidad 2: Modelado de Sistemas Dinámicos2.7.1 Ecuaciones de equilibrio para sistemas mecánicos rotacionalesSe presentan las leyes y ecuaciones de equilibrio que rigen el comportamiento de los sistemas mecánicos rotacionales. Tema correspondiente a la Unidad 2: Modelado de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control, para las carreras de ingeniería eléctrica, electrónica, mecánica y afines.
2016-02-1000 minUnidad 2: Modelado de Sistemas Dinámicosc) Inertancia mecánica rotacionalElementos de modelado de sistemas mecánicos rotacionales, representación matemática y definición de inercia mecánica o inertancia mecánica rotacional. Tema correspondiente a la Unidad 2: Modelado de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control, para las carreras de ingeniería eléctrica, electrónica, mecánica y afines.
2016-02-1002 minUnidad 2: Modelado de Sistemas Dinámicosb) Capacitancia mecánica rotacionalElementos de modelado de sistemas mecánicos rotacionales, representación matemática y definición de capacitancia mecánica rotacional. Tema correspondiente a la Unidad 2: Modelado de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control, para las carreras de ingeniería eléctrica, electrónica, mecánica y afines.
2016-02-1002 minUnidad 2: Modelado de Sistemas Dinámicosa) Resistencia mecánica rotacionalElementos de modelado de sistemas mecánicos rotacionales, representación matemática y definición de resistencia mecánica rotacional. Tema correspondiente a la Unidad 2: Modelado de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control, para las carreras de ingeniería eléctrica, electrónica, mecánica y afines.
2016-02-1002 minUnidad 2: Modelado de Sistemas Dinámicos2.6.1 Ecuaciones de equilibrio para sistemas mecánicos traslacionalesSe presentan las leyes y ecuaciones de equilibrio que rigen el comportamiento de los sistemas mecánicos traslacionales. Tema correspondiente a la Unidad 2: Modelado de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control, para las carreras de ingeniería eléctrica, electrónica, mecánica y afines.
2016-02-1001 minUnidad 2: Modelado de Sistemas Dinámicosc) Inertancia mecánica traslacionalElementos de modelado de sistemas mecánicos traslacionales, representación matemática y definición de inercia mecánica o inertancia mecánica traslacional. Tema correspondiente a la Unidad 2: Modelado de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control, para las carreras de ingeniería eléctrica, electrónica, mecánica y afines.
2016-02-1002 minUnidad 2: Modelado de Sistemas Dinámicosb) Capacitancia mecánica traslacionalElementos de modelado de sistemas mecánicos traslacionales, representación matemática y definición de capacitancia mecánica traslacional. Tema correspondiente a la Unidad 2: Modelado de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control, para las carreras de ingeniería eléctrica, electrónica, mecánica y afines.
2016-02-1002 minUnidad 2: Modelado de Sistemas Dinámicosa) Resistencia mecánica traslacionalElementos de modelado de sistemas mecánicos traslacionales, representación matemática y definición de resistencia mecánica traslacional. Tema correspondiente a la Unidad 2: Modelado de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control, para las carreras de ingeniería eléctrica, electrónica, mecánica y afines.
2016-02-1003 minUnidad 2: Modelado de Sistemas Dinámicos2.5.1 Ecuaciones de equilibrio para sistemas de reacción químicaSe presentan las leyes y ecuaciones de equilibrio que rigen el comportamiento de los sistemas de reacción química. Tema correspondiente a la Unidad 2: Modelado de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control, para las carreras de ingeniería eléctrica, electrónica, mecánica y afines.
2016-02-0902 minUnidad 2: Modelado de Sistemas Dinámicos2.5 Modelado de sistemas de reacciónSe presentan los conceptos y representación matemática de las principales características de los reactores químicos continuos. Tema correspondiente a la Unidad 2: Modelado de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control, para las carreras de ingeniería eléctrica, electrónica, mecánica y afines.
2016-02-0902 minUnidad 2: Modelado de Sistemas Dinámicos2.4.1 Ecuaciones de equilibrio para sistemas de concentraciónSe presentan las leyes y ecuaciones de equilibrio que rigen el comportamiento de los sistemas de concentración en procesos industriales. Tema correspondiente a la Unidad 2: Modelado de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control, para las carreras de ingeniería eléctrica, electrónica, mecánica y afines.
2016-02-0900 minUnidad 2: Modelado de Sistemas Dinámicos2.4 Modelado de sistemas de concentraciónSe presenta la descripción de los sistemas de concentración. Tema correspondiente a la Unidad 2: Modelado de Sistemas Dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control, para las carreras de ingeniería eléctrica, electrónica, mecánica y afines.
2016-02-0900 min
Unidad 3: Modelado en el Espacio de Estados3. Introducción al modelado de sistemas dinámicos en el espacio de estadosIntroducción para la Unidad 3: Modelado de sistemas dinámicos en el espacio de estados, del curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
2016-01-1901 min
Unidad 1: Introducción a los sistemas dinámicos1.6 Leyes físicas de equilibrioDefinición e importancia de la leyes físicas de equilibrio para el modelado de sistemas físicos, correspondiente a la Unidad 1: Introducción a los sistemas dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control.
2015-11-2101 minUnidad 1: Introducción a los sistemas dinámicosc) InertaniciaDefinición del parámetro inertancia para el modelado de sistemas físicos, correspondiente a la Unidad 1: Introducción a los sistemas dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control.
2015-11-2101 minUnidad 1: Introducción a los sistemas dinámicosb) CapacitanciaDefinición del parámetro capacitancia para el modelado de sistemas físicos, correspondiente a la Unidad 1: Introducción a los sistemas dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control.
2015-11-2101 minUnidad 1: Introducción a los sistemas dinámicosa) ResistenciaDefinición del parámetro resistencia o su reciproco la conductancia para el modelado de sistemas físicos, correspondiente a la Unidad 1: Introducción a los sistemas dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control.
2015-11-2001 minUnidad 1: Introducción a los sistemas dinámicos1.5.2 ParámetrosDefinición del termino parámetro para el modelado de sistemas físicos, correspondiente a la Unidad 1: Introducción a los sistemas dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control.
2015-11-2002 minUnidad 1: Introducción a los sistemas dinámicos1.5.1 VariablesDefinición y clases de variables presentes en el modelado de sistemas físicos, para la unidad 1: Introducción a los sistemas dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control.
2015-11-2002 minUnidad 1: Introducción a los sistemas dinámicos1.5 Elementos básicos de modeladoDefinición del los elementos básicos para el modelado de sistemas físicos, conocidos como variables y parámetros, para la Unidad 1: Introducción a los sistemas dinámicos, pertenecientes al curso de Sistemas Dinámicos y de control.
2015-11-2001 minUnidad 1: Introducción a los sistemas dinámicos1.4 Concepto de modeloDefinición del termino modelo en el contexto de los sistemas dinámicos para la Unidad 1: Introducción a los sistemas dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control.
2015-11-2002 minUnidad 1: Introducción a los sistemas dinámicos1.3 Estudio de los sistemasPautas necesarias para el estudio los sistemas dinámicos, correspondientes a la Unidad 1: Introducción a los sistemas dinámicos, perteneciente al curso de Sistemas Dinámicos y de Control.
2015-11-2002 minUnidad 1: Introducción a los sistemas dinámicos1.2 Clasificación de los sistemasClasificación de los sistemas para la Unidad 1: Introducción a los sistemas dinámicos, perteneciente al curso de Sistemas dinámicos y de control.
2015-11-2001 min